Adding a New Airframe Configuration
PX4 uses canned airframe configurations as starting point for airframes. The configurations are defined in config files that are stored in the ROMFS/px4fmu_common/init.d folder. The config files reference mixer files that describe the physical configuration of the system, and which are stored in the ROMFS/px4fmu_common/mixers folder.
Adding a configuration is straightforward: create a new config file in the init.d folder (prepend the filename with an unused autostart ID), then build and upload the software.
Developers who do not want to create their own configuration can instead customize existing configurations using text files on the microSD card, as detailed on the custom system startup page.
Configuration File Overview
The configuration in the config and mixer files consists of several main blocks:
- Airframe documentation (used in the Airframes Reference and QGroundControl).
- Vehicle-specific parameter settings, including tuning gains.
- The controllers and apps it should start, e.g. multicopter or fixed wing controllers, land detectors etc.
- The physical configuration of the system (e.g. a plane, wing or multicopter). This is called a mixer.
These aspects are mostly independent, which means that many configurations share the same physical layout of the airframe, start the same applications and differ most in their tuning gains.
New airframe files are only automatically added to the build system after a clean build (run
make clean).
Config File
A typical configuration file is shown below (original file here) .
The first section is the airframe documentation. This is used in the Airframes Reference and QGroundControl.
#!nsh
#
# @name Wing Wing (aka Z-84) Flying Wing
#
# @url https://docs.px4.io/en/framebuild_plane/wing_wing_z84.html
#
# @type Flying Wing
# @class Plane
#
# @output MAIN1 left aileron
# @output MAIN2 right aileron
# @output MAIN4 throttle
#
# @output AUX1 feed-through of RC AUX1 channel
# @output AUX2 feed-through of RC AUX2 channel
# @output AUX3 feed-through of RC AUX3 channel
#
# @maintainer Lorenz Meier <lorenz@px4.io>
#
The next section specifies vehicle-specific parameters, including tuning gains:
sh /etc/init.d/rc.fw_defaults
if [ $AUTOCNF == yes ]
then
param set BAT_N_CELLS 2
param set FW_AIRSPD_MAX 15
param set FW_AIRSPD_MIN 10
param set FW_AIRSPD_TRIM 13
param set FW_R_TC 0.3
param set FW_P_TC 0.3
param set FW_L1_DAMPING 0.74
param set FW_L1_PERIOD 16
param set FW_LND_ANG 15
param set FW_LND_FLALT 5
param set FW_LND_HHDIST 15
param set FW_LND_HVIRT 13
param set FW_LND_TLALT 5
param set FW_THR_LND_MAX 0
param set FW_PR_FF 0.35
param set FW_RR_FF 0.6
param set FW_RR_P 0.04
fi
Set frame type (MAV_TYPE):
# Configure this as plane
set MAV_TYPE 1
Set the mixer to use:
# Set mixer
set MIXER wingwing
Configure PWM outputs (specify the outputs to drive/activate, and the levels).
# Provide ESC a constant 1000 us pulse
set PWM_OUT 4
set PWM_DISARMED 1000
If you want to reverse a channel, never do this on your RC transmitter or with e.g
RC1_REV. The channels are only reversed when flying in manual mode, when you switch in an autopilot flight mode, the channels output will still be wrong (it only inverts your RC signal). Thus for a correct channel assignment change either your PWM signals withPWM_MAIN_REV1(e.g. for channel one) or change the signs of the output scaling in the corresponding mixer (see below).
Mixer File
First read Concepts > Mixing. This provides background information required to interpret this mixer file.
A typical mixer file is shown below (original file here). A mixer filename, in this case wingwing.main.mix, gives important information about the type of airframe (wingwing), the type of output (.main or .aux) and lastly that it is a mixer file (.mix).
The mixer file contains several blocks of code, each of which refers to one actuator or ESC. So if you have e.g. two servos and one ESC, the mixer file will contain three blocks of code.
The plugs of the servos / motors go in the order of the mixers in this file.
So MAIN1 would be the left aileron, MAIN2 the right aileron, MAIN3 is empty (note the Z: zero mixer) and MAIN4 is throttle (to keep throttle on output 4 for common fixed wing configurations).
A mixer is encoded in normalized units from -10000 to 10000, corresponding to -1..+1.
M: 2
O: 10000 10000 0 -10000 10000
S: 0 0 -6000 -6000 0 -10000 10000
S: 0 1 6500 6500 0 -10000 10000
Where each number from left to right means:
- M: Indicates two scalers for two control inputs. It indicates the number of control inputs the mixer will receive.
- O: Indicates the output scaling (1 in negative, 1 in positive), offset (zero here), and output range (-1..+1 here). If you want to invert your PWM signal, the signs of the output scalings have to be changed. (
O: -10000 -10000 0 -10000 10000) - S: Indicates the first input scaler: It takes input from control group #0 (Flight Control) and the first input (roll). It scales the roll control input * 0.6 and reverts the sign (-0.6 becomes -6000 in scaled units). It applies no offset (0) and outputs to the full range (-1..+1)
- S: Indicates the second input scaler: It takes input from control group #0 (Flight Control) and the second input (pitch). It scales the pitch control input * 0.65. It applies no offset (0) and outputs to the full range (-1..+1)
In short, the output of this mixer would be SERVO = ( (roll input -0.6 + 0) + (pitch input 0.65 + 0) ) * 1 + 0
Behind the scenes, both scalers are added, which for a flying wing means the control surface takes maximum 60% deflection from roll and 65% deflection from pitch.
The complete mixer looks like this:
Delta-wing mixer for PX4FMU
===========================
Designed for Wing Wing Z-84
This file defines mixers suitable for controlling a delta wing aircraft using
PX4FMU. The configuration assumes the elevon servos are connected to PX4FMU
servo outputs 0 and 1 and the motor speed control to output 3. Output 2 is
assumed to be unused.
Inputs to the mixer come from channel group 0 (vehicle attitude), channels 0
(roll), 1 (pitch) and 3 (thrust).
See the README for more information on the scaler format.
Elevon mixers
-------------
Three scalers total (output, roll, pitch).
The scaling factor for roll inputs is adjusted to implement differential travel
for the elevons.
This first block of code is for Servo 0...
M: 2
O: 10000 10000 0 -10000 10000
S: 0 0 -6000 -6000 0 -10000 10000
S: 0 1 6500 6500 0 -10000 10000
And this is for Servo 1...
M: 2
O: 10000 10000 0 -10000 10000
S: 0 0 -6000 -6000 0 -10000 10000
S: 0 1 -6500 -6500 0 -10000 10000
Note that in principle, you could implement left/right wing asymmetric mixing, but in general the two blocks of code will be numerically equal, and just differ by the sign of the third line (S: 0 1), since to roll the plane, the two ailerons must move in OPPOSITE directions. The signs of the second lines (S: 0 0) are indentical, since to pitch the plane, both servos need to move in the SAME direction.
Output 2
--------
This mixer is empty.
Z:
Motor speed mixer
-----------------
Two scalers total (output, thrust).
This mixer generates a full-range output (-1 to 1) from an input in the (0 - 1)
range. Inputs below zero are treated as zero.
M: 1
O: 10000 10000 0 -10000 10000
S: 0 3 0 20000 -10000 -10000 10000
Tuning Gains
The following PX4 User Guide topics explain how to tune the parameters that will be specified in the config file:
Add New Airframe to QGroundControl
To make a new airframe available for section in the QGroundControl airframe configuration:
- Make a clean build (e.g. by running
make cleanand thenmake px4fmu-v5_default) Open QGC and select Custom firmware file... as shown below:
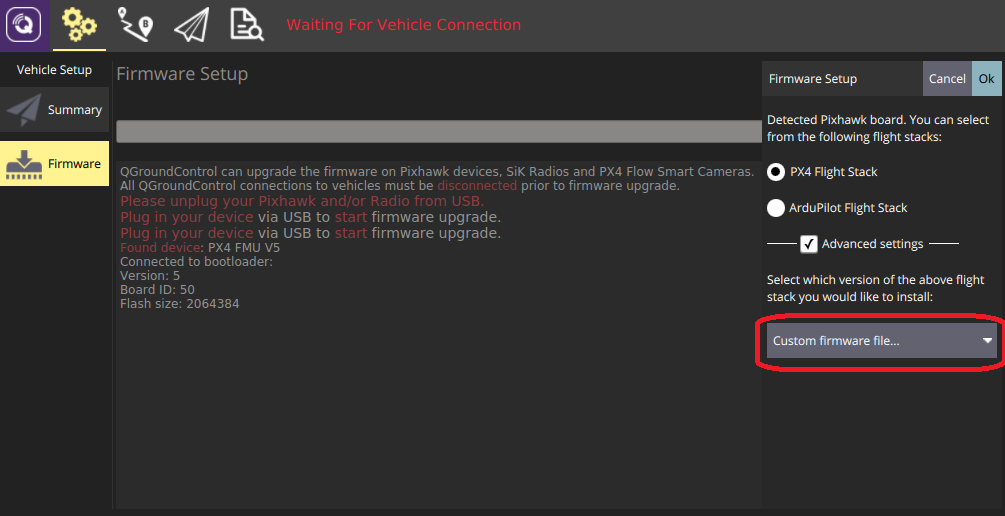
You will be asked to choose the .px4 firmware file to flash (this file is a zipped JSON file and contains the airframe metadata).
- Navigate to the build folder and select the firmware file (e.g. Firmware/build/px4fmu-v5_default/px4fmu-v5_default.px4).
- Press OK to start flashing the firmware.
- Restart QGroundControl.
The new airframe will then be available for selection in QGroundControl.